Page 1 sur 2
Rc autopilotée.
Publié : 12 oct. 2012, 22:41
par LeGlod
Salut,
j'ai pas lu, trop compliquer, mais je suis tomber sur ca !
 http://spench.net/car/major_project.html
http://spench.net/car/major_project.html
Bon courage

Re: Rc autopilotée.
Publié : 12 oct. 2012, 22:44
par Neb
En tout cas c'est pas la conception du châssis qui leur a retourné les neurones!
C'est un véhicule autonome?
Re: Rc autopilotée.
Publié : 12 oct. 2012, 22:53
par LeGlod
Je crois bien pour le peut que j'ai lu, positionnement par satellite et tout et tout !
Traduction Google
Objectif
La portée de ce rapport traitera de l'objectif (voir ci-dessous), montrent le développement conceptuel, la construction proprement dite du projet et d'analyser les résultats, qui indiquent la réussite du projet. En outre, les développements futurs sont répertoriés qui ont été tentées avec plus de temps.
Le simple but de ce projet était de développer un système qui pourrait diriger un véhicule à travers plusieurs points sur la surface de la Terre à l'aide de l'Atom BasicMicro.
Cet objectif fondamental dicte alors le type de technologie et de programmation à utiliser:
· Pour suivre la position, l'altitude et le cap d'un objet sur la surface de la Terre, le Global Positioning System doit être utilisé. Par conséquent, un récepteur est nécessaire que va afficher les données dans un format qui peut être interprété par l'Atom.
· Pour la voiture pour se déplacer réellement autour de la Terre, le programme doit contenir une liste de coordonnées qui spécifient points dans un système de coordonnées choisi.
· Ces points doivent être dynamiques (elles peuvent être saisies et modifiées durant l'exécution du programme de l'atome). Ceci peut être réalisé via une entrée numérique sur un clavier.
· La rétroaction est logiquement nécessaire pour une utilisation efficace et le débogage (il serait très difficile d'utiliser l'équipement si un homme ne connaît pas son état). Par conséquent, un écran LCD peut être utilisé pour afficher des données de caractères, fournissant une interface affichant une série de menus simples pour la saisie des données et de sortie.
· En raison de perturbations atmosphériques (mais n'est plus appliquée aux États-Unis "Selective Availability") les coordonnées obtenues à partir des récepteurs GPS peuvent être très imprécis sur les échelles de distances prévues dans cette expérience. Faisant usage de corrections GPS différentielles peuvent grandement améliorer la précision avec une résolution de quelques mètres. Donc, si la navigation qui repose uniquement sur le GPS n'est pas jugée suffisamment précise, la résolution effective du récepteur peut être améliorée en utilisant un récepteur DGPS.
· Comme une fonction supplémentaire: un capteur de distance monté sur l'avant du véhicule pour détecter les collisions imminentes et entraîner en conséquence pour éviter un accident.
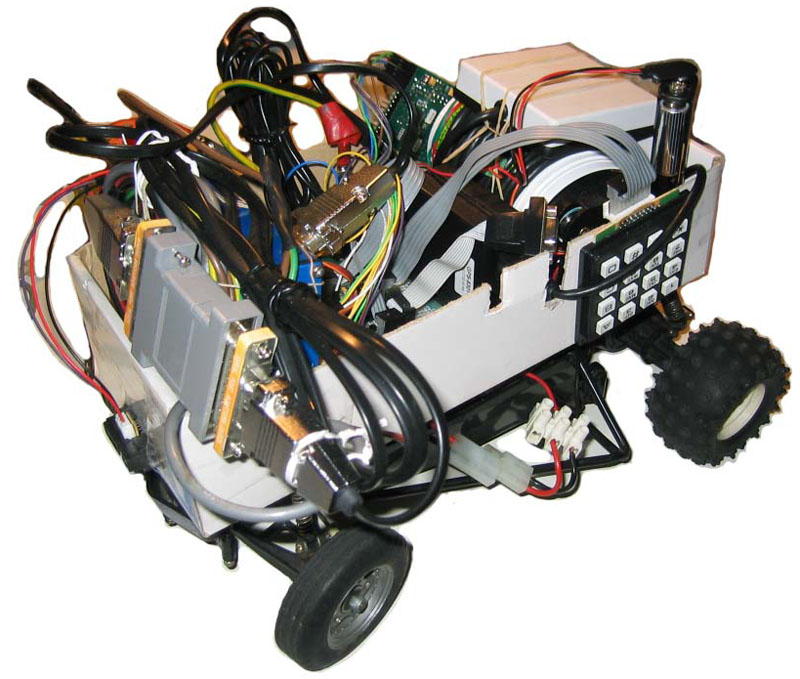
Bien que ce type de navigation autonome qui a été accompli dans les produits commerciaux, l'objectif de ce projet est de faire fonctionner un tel système dans un petit véhicule, à savoir un modèle de voiture de course. Compte tenu de la taille d'un tel véhicule, deux limites entreront en vigueur:
1. La masse totale des composants et des circuits supplémentaires: raisonnablement, la voiture ne sera en mesure de conduire avec la masse du projet (sur le toit de la voiture) si elle est sous un certain seuil. Par conséquent il faut veiller à ne pas surcharger le moteur.
2. Practice de voiture: Comme la voiture est petite, la distance sur laquelle il peut conduire est également limitée. Cela signifie que la résolution du GPS doit être suffisamment petit pour que la 'moyenne' changement de position (causée par la conduite de la voiture pour une courte période de temps) sera reflété sur fix coordonnées du destinataire.
Re: Rc autopilotée.
Publié : 12 oct. 2012, 22:56
par Madbearz
Salut,
ben en gros c'est une copie maladroite d'un drone volant......et avec de l'electronique des annes 80 (qui prend de la place quoi) :lol: :lol: :lol: :lol: :lol:
Car sa fait un moment que sa vole les quadri avec des coordonnées gps
seb
Re: Rc autopilotée.
Publié : 12 oct. 2012, 23:01
par Neb
J'adore le bon vieux domino, du pure high tech! On croirait l’installation de l'autoradio de ma première voiture

Re: Rc autopilotée.
Publié : 12 oct. 2012, 23:03
par LeGlod
Il faut noter qu'ils ont garder le variateur mecanique aussi
Je ne sais pas de quand date le projet pas fait attention ?
Re: Rc autopilotée.
Publié : 13 oct. 2012, 01:18
par Neb
Je pense que le châssis RC nous indique la date du projet
D’ailleurs la prise Tamiya est branchée bizarre non??
Re: Rc autopilotée.
Publié : 13 oct. 2012, 08:12
par tamiyavintage
un quadri ça vole, à moins de croiser un oiseau ou un arbre... Je pense que le guidage au sol est beaucoup plus complexe, beaucoup plus de paramètres à gérer : obstacles, irrégularités du sol, adhérence... On est pas prêt d'avoir ça surtout en tt.
[ Message depuis Android ] 
Re: Rc autopilotée.
Publié : 13 oct. 2012, 08:26
par Madbearz
Salut, c'est pareil....
tu programme un parcours en fonction de coordonnee et n'etant pas idiot tu la fais passer aux endroit ou tu sais qu'elle passe.
Si le module gps est suffisamment bon, y a pas de soucis a y faire tourner sur une piste TT.
Pour avoir vu le quadri du collegue, c'est vraiment guidée au cm pres. Et un coup de vent en quadri peut tres bien correspondre a une bosse en voiture (qui la devierais)......
Seb
Re: Rc autopilotée.
Publié : 13 oct. 2012, 09:17
par LeGlod
Apparemment ca date au moins de 2003 .